Wind and snow all night long. Closed dome testing with swing arm to check the
TipTiltOffsetLookupTable
LUCI spinning and tt offset LUT check
System is setup to be able to measure star and mask position on LUCI (see
HowToSetUpForLUCIOffsetCalibration)
The 2 systems were setup in different configurations: SX has CCD39 running at 200Hz with a modulation of 1.60V ptv, while DX has CCD39 running at 105Hz with modulation of 1.49V ptv
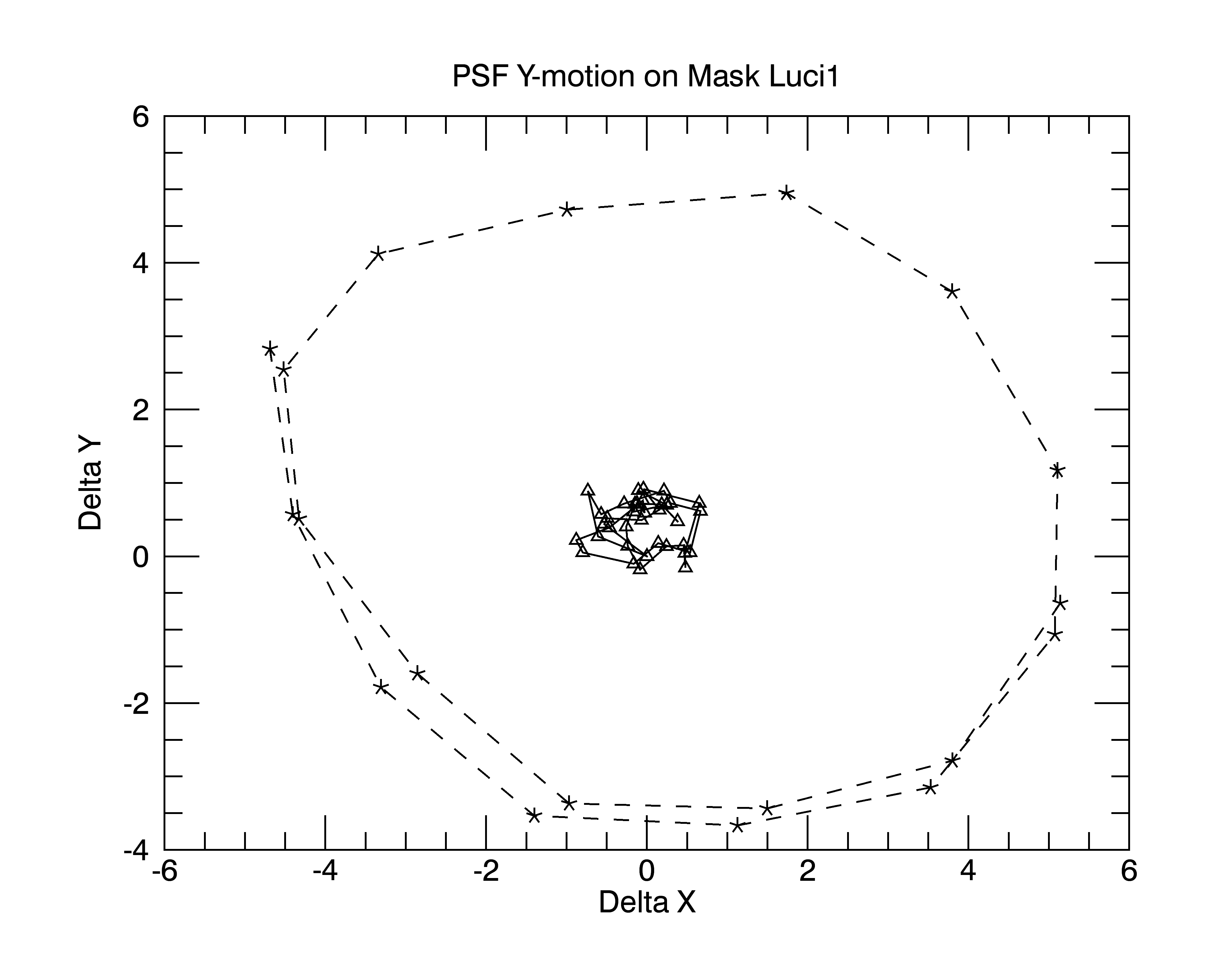
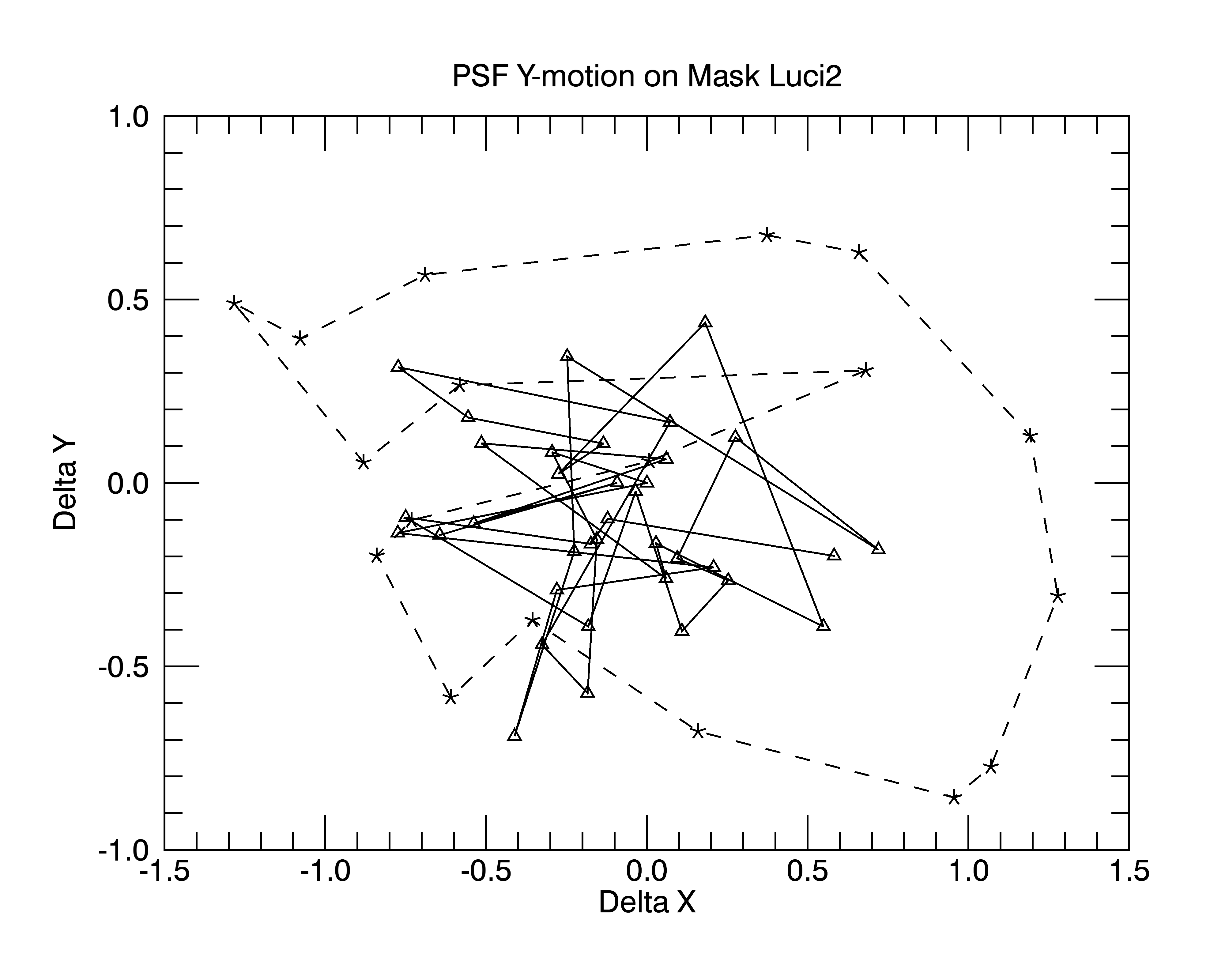
Pointing error measurement
Several rotator full rotations are done with a LUCI scripts (see
FlexComp_Calib30.xml) that rotates in steps of 30deg and acquires LUCI images. SR has a program to analyze the data and fit the pointing error (defined as star_position - mask_position). The attached files (
L1_X_avg_wobble.fits,
L1_Y_avg_wobble.fits,
L2_X_avg_wobble.fits,
L2_Y_avg_wobble.fits) are the pointing error for LUCI1 and LUCI2 measured between -90 and 450 deg in steps of 30 deg.
Calibration of TT offsets to LUCI delta pointing.
On SX side:
| Piezo TT offset |
star_position |
mask_position |
notes |
| (0,0) |
(942.68, 1089.60) |
924.08, 516.67 |
Rot=341 |
| (1,0) |
(941.08, 1090.42) |
924.13, 516.66 |
Rot=341 |
| (2,0) |
(939.38, 1091.15) |
924.06, 516.65 |
Rot=341 |
| (-2,0) |
(946.02, 1088.33) |
924.04, 516.64 |
Rot=341 |
| (0,2) |
(944.23, 1092.64) |
924.08, 516.66 |
Rot=341 |
| (0,-2) |
(941.17, 1086.57) |
924.10, 516.63 |
Rot=341 |
| (0,0) |
(942.66, 1089.58) |
924.13, 516.68 |
Rot=341 |
where the offsets are in Volts, star and mask position are pixels in LUCI 3.75 camera. The mask position is the position of the image of one (always the same!) hole of the N30 field stop mask
From the measurements with offset of 2V we derive the calibration
| IM (px/V) |
| -1.66 |
0.765 |
| 0.705 |
1.5175 |
| REC (V/px) |
| -0.496 |
0.25 |
| 0.23 |
0.543 |
On DX side we repeat the same procedure:
| Piezo TT offset |
star_position |
mask_position |
notes |
| (0,0) |
(981.34, 1054.14) |
947.23, 526.42 |
Rot=210 |
| (2,0) |
(982.88, 1057.16) |
947.17, 526.45 |
Rot=210 |
| (-2,0) |
(979.68, 1051.10) |
947.17, 526.46 |
Rot=210 |
| (0,2) |
(984.61, 1052.50) |
947.14, 526.39 |
Rot=210 |
| (0,-2) |
(977.97, 1055.71) |
947.16, 526.40 |
Rot=210 |
p00=np.array([981.34, 1054.14])
p20=np.array([982.88, 1057.16])
pn20= np.array([979.68, 1051.1])
p02= np.array([984.61, 1052.5])
p0n2= np.array([977.97, 1055.71])
im=np.zeros((2,2))
im[:,0]= (p20-pn20)/4
im[:,1]= (p02-p0n2)/4
rec= np.linalg.pinv(im)
| IM (px/V) |
| 0.8 |
1.66 |
| 1.515 |
-0.8025 |
| REC (V/px) |
| 0.25420507 |
0.5258323 |
| 0.47990117 |
-0.25341316 |
Look up table
We create the LUT for TT offset SX:
rec1= np.array([[-0.49617853, 0.25013283], [ 0.23051457, 0.5427719]])
l1x=pyfits.getdata('/home/argos/Downloads/L1_X_avg_wobble.fits')
l1y=pyfits.getdata('/home/argos/Downloads/L1_Y_avg_wobble.fits')
delta= np.array([l1x, l1y])
angle= np.arange(19)*30 -90
lut1= np.vstack((angle, -1. * np.dot(rec1, delta))).T
np.savetxt('tt_offset.txt.l1.170509', lut1, fmt='%10.3f')
Same for DX:
rec2=np.array([[ 0.25420507, 0.5258323 ],[ 0.47990117, -0.25341316]])
l2x=pyfits.getdata('/home/argos/Downloads/L2_X_avg_wobble.fits')
l2y=pyfits.getdata('/home/argos/Downloads/L2_Y_avg_wobble.fits')
delta= np.array([l2x, l2y])
angle= np.arange(19)*30 -90
lut2= np.vstack((angle, -1. * np.dot(rec2, delta))).T
np.savetxt('tt_offset.txt.l2.170509', lut2, fmt='%10.3f')
Files are attached and committed in the svn
Look up table check
We repeat the same procedure used above to estimate the pointing error, but with the LUT enabled.
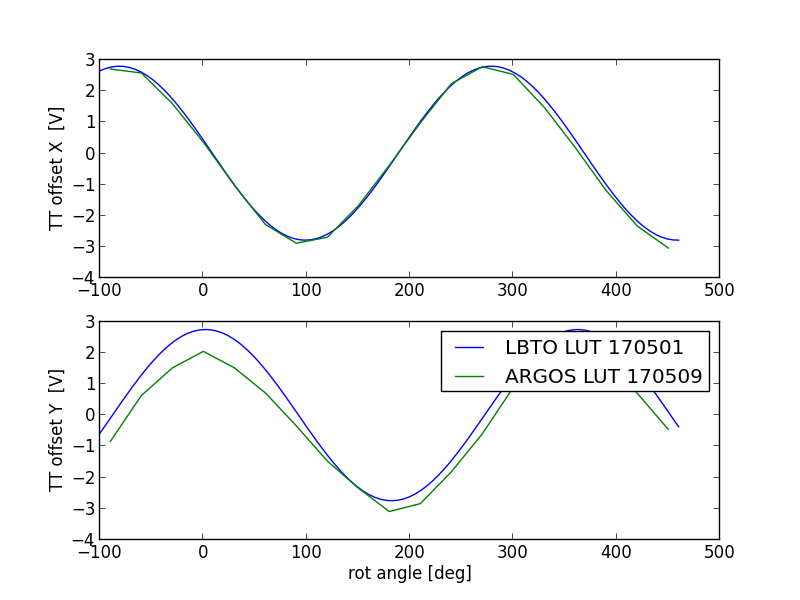
We have 2 LUT availables:
- 170501: LBTO LUT. Measured with FLAO in bin1 and LUCI N30 camera. Files are in svn: svn.lbto.org/repos/aosupervisor/confcalib/calib/wfs/W1/tt_offset/tt_offset.txt.l1.170501 and svn.lbto.org/repos/aosupervisor/confcalib/calib/wfs/W2/tt_offset/tt_offset.txt.l2.170501
- 170509: ARGOS LUT. Measured with FLAO in bin4 using ARGOS SW and LUCI N3.75. Procedure is described above. Files are in svn: svn.lbto.org/repos/aosupervisor/confcalib/calib/wfs/W1/tt_offset/tt_offset.txt.l1.170509 and svn.lbto.org/repos/aosupervisor/confcalib/calib/wfs/W2/tt_offset/tt_offset.txt.l2.170509
The history of this measurements is the following:
Measure 1 configuration and AO setup is not well known? (see
NightTime20170505). We probably did an error during the acquisition (?), but the results were not good with a residual of about 5-6 px on SX (see
SX_ROTANG.pdf)
Measure 2 was done to test ARGOS LUT. Results are similar to the ones reached by Doug on LUT 170501: the pointing error is reduced by about a factor 10 on SX leaving a ptv residual of about 0.1" (1px on N3.75) over the entire rotator range. On DX, that has a better alignment, the ptv residual is anyhow of the same order, slightly better than 1px
See
and the following plots
SX_ROTANG_2.pdf,
DX_ROTANG_2.pdf
Measure 3 was done to check a possible dependency on TT modulator frequency, and it was done on SX only at 750Hz with the LUT 170509 (measured at 200Hz). See
SX_ROTANG_3.pdf: the correction is as good as in Measure 2
We then realized that the difference between the 2 LUTs is really minimal. See
So we decided to repeat Measure 1 using LBTO LUT in a more controlled way. The results are good (see
SX_ROTANG_4.pdf), consistent with the ones found by Doug in email of 170501
Conclusions so far:
- LBTO's LUT and ARGOS LUT are pretty much the same, (the one of ARGOS is rougher, yet!)
- Both LUTs work fine in day-time with a residual pointing error of about 0.1"
- There is no dependency on modulation frequency.
- We are still missing a good test on sky. The LUT 170501 was used on-sky in the past nights without success, but the reason is not clear (?)
Attachments

{kind=link}
{kind=link}
{kind=link}