FoV measurement
| DX HEXA |
-3.94 |
-2.36 |
0.73 |
-174 |
-384 |
We try to measure the LGSW
FoV, we close the loop w/ 2015/07 rec but today it does not work.
- Pos0: hexapod is centered in the best position to match the 3 FoVs:
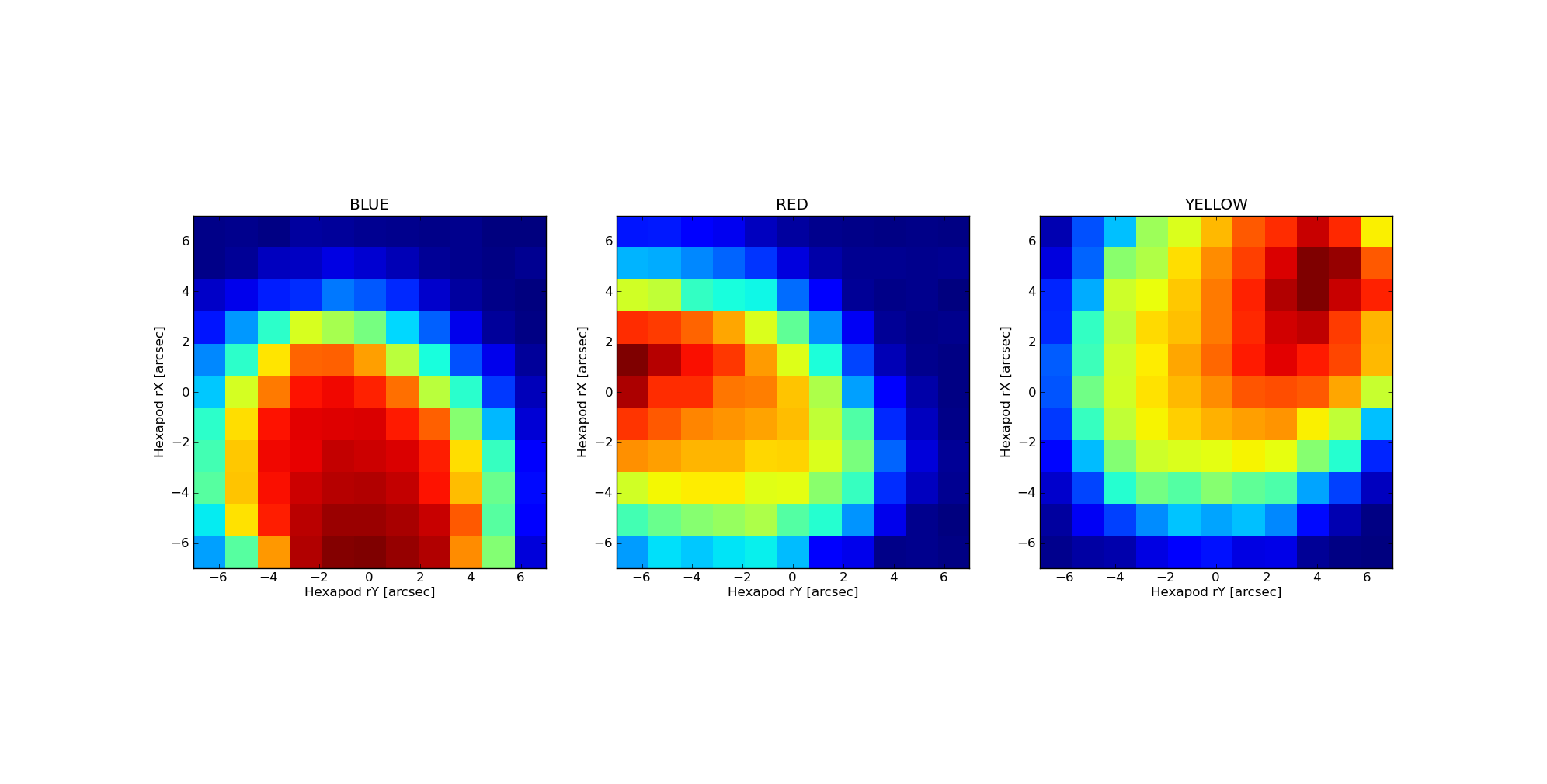
- Pos1: we moved the hexapod to center the blue FoV: Rx= -178; Ry= -384, PI jitter= [0.00074; 0.00324] rad
- Pos2: hexapod move to match the RED FoV: Rx= -174; Ry= -388, PI jitter @ [0.00047; 0.00368] rad

- Pos3: hexapod on YELLOW FoV: Rx= -172; Ry= -382; PI jitter @ [0.007; -0.002] rad.

But PI yellow is too far from 0 so we pan the yellow pupil subaps by [0, 3]px and then we save the set to
subaps: 20161205_194700.
Now PI Yellow is @ [0.00091; 0.00042] rad.
- Jitter initial position saved as: 20161205_194700
Now we optimize the pupil position looking at the illumination pattern:
Then we go back to the individual centers:
- Pos 1/A: Rx= -178; Ry= -384: PI Blue @ [0.00060; 0.00395] rad. We decide to pan also Blue pupil by [0, +2]px. After this the subaperture set is: 20161205_200400 and the PI Blue @ [-0.00172; 0.00150] rad.
- Pos 2/A: Rx= -174; Ry= -388: PI Red @ [0.00036; 0.00370] rad. We move the Red pupil by [-1; +1]px. Then we save the subaperture set: 20161205_201600. PI Red @ [-0.00065; 0.00146] rad.
- Pos 3/A: Rx= -172; Ry= -382: PI Yellow @ [0.00071; 0.00056]rad. OK.
Jitter initial position: 201612105_202200.
After this we close the loop w/ 2016/05 rec.
| DX HEXA |
-3.94 |
-2.36 |
0.735 |
-175 |
-368 |
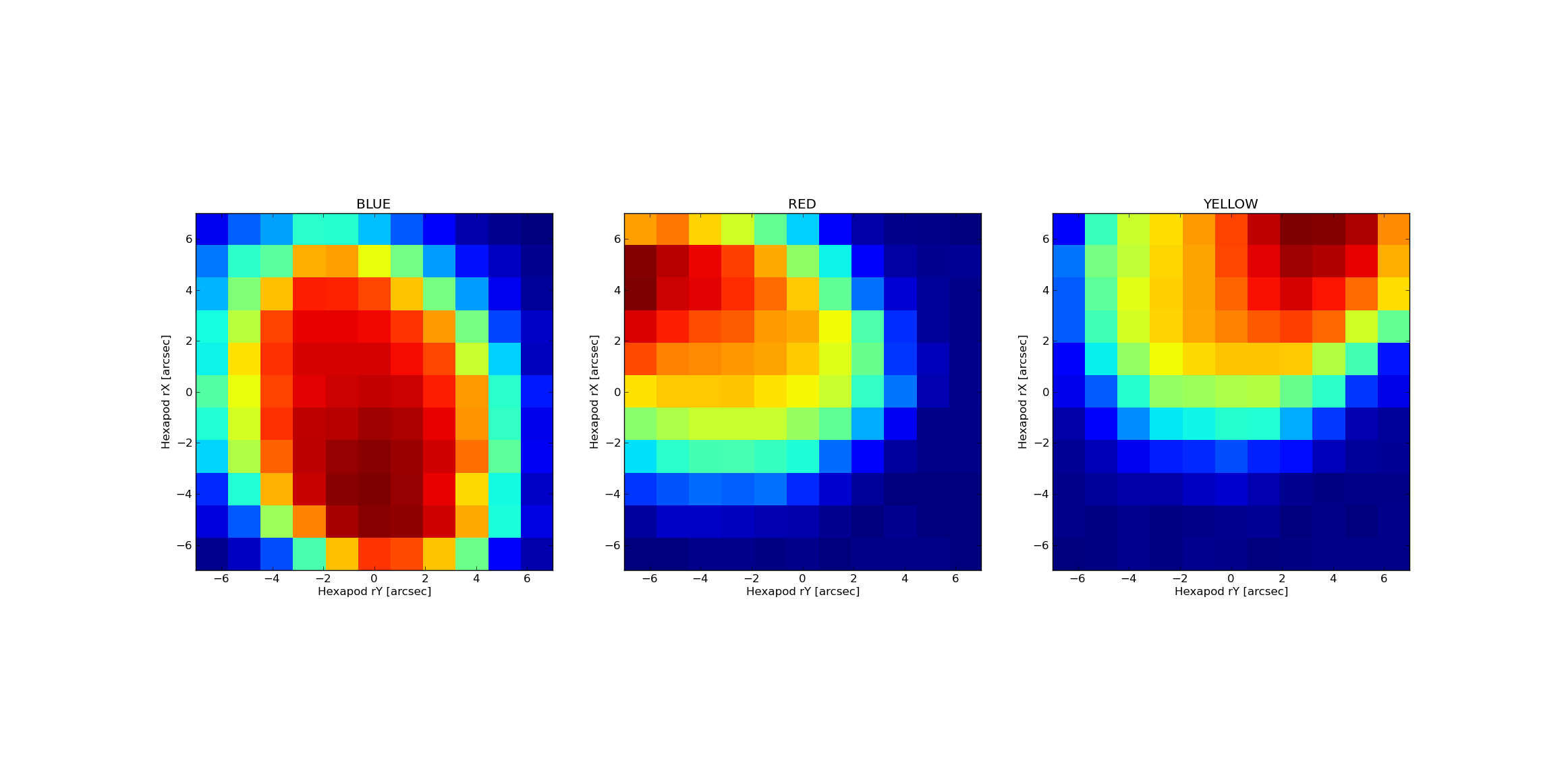
We can close on 36 modes, we acquire some snapshots:
14:00: we realized we did an error in calibrating the
FoV centers: we must acquire the pupil position at each
FoV center not at the "best out of 3" centers...
- Pos 1/B: BLUE PM @ [425; 500], PI @ [-1.09; 1.33] mrad
- Pos 2/B: RED PM @ [410; 310], PI @ [-0.72; 2.14] mrad
- Pos 3/B: YELLOW PM @ [280; 345], PI @ [1.06; 0.01] mrad
Jitter initial position saved as: 20161205_210900, good for night time operations.
We save also
pupil target tag, independently for the 3 channels (at each
FoV center): 20161205_211147 (yellow), 20161205_211420 (blue), 20161205_211454 (red).
Then we go back to the hexapod center coordinates, the pupil positions seems still fine looking at the illumination pattern.
| Pupil |
PIX |
PIY |
| Blue |
2.40 |
-0.38 |
| Yellow |
-1.18 |
1.62 |
| Red |
-3.38 |
5.04 |
We save the
jitter initial position as 20161205_212437, that is good for daytime operations.
We restore modal history for 10 modes from 2016/05:
But the modal amplitude is too big we are saturating the sensor. We divide it by 2 and repeat.
New modal amplitude for 10 modes: 20161205_213200,
modal amplitude for 150 modes: 20161205_214300 and modal histories: 20161205_213010, _213050, _213150.
We re-position pupil motors by hand, looking at illumination pattern:
PI initial position set as 20161205_212437.
We start acquiring new IMs:
| MH |
LGSW IM |
LGSW REC |
| 20160516_213010 |
20161205_213527 |
20161205_213900 |
| 20160516_213050 |
20161205_214929 |
20161205_214800 |
| 20160516_213150 |
20161205_215041 |
- |

They seem quite bad, we try to acquire a new IM w/o running the CL:
It looks much better:
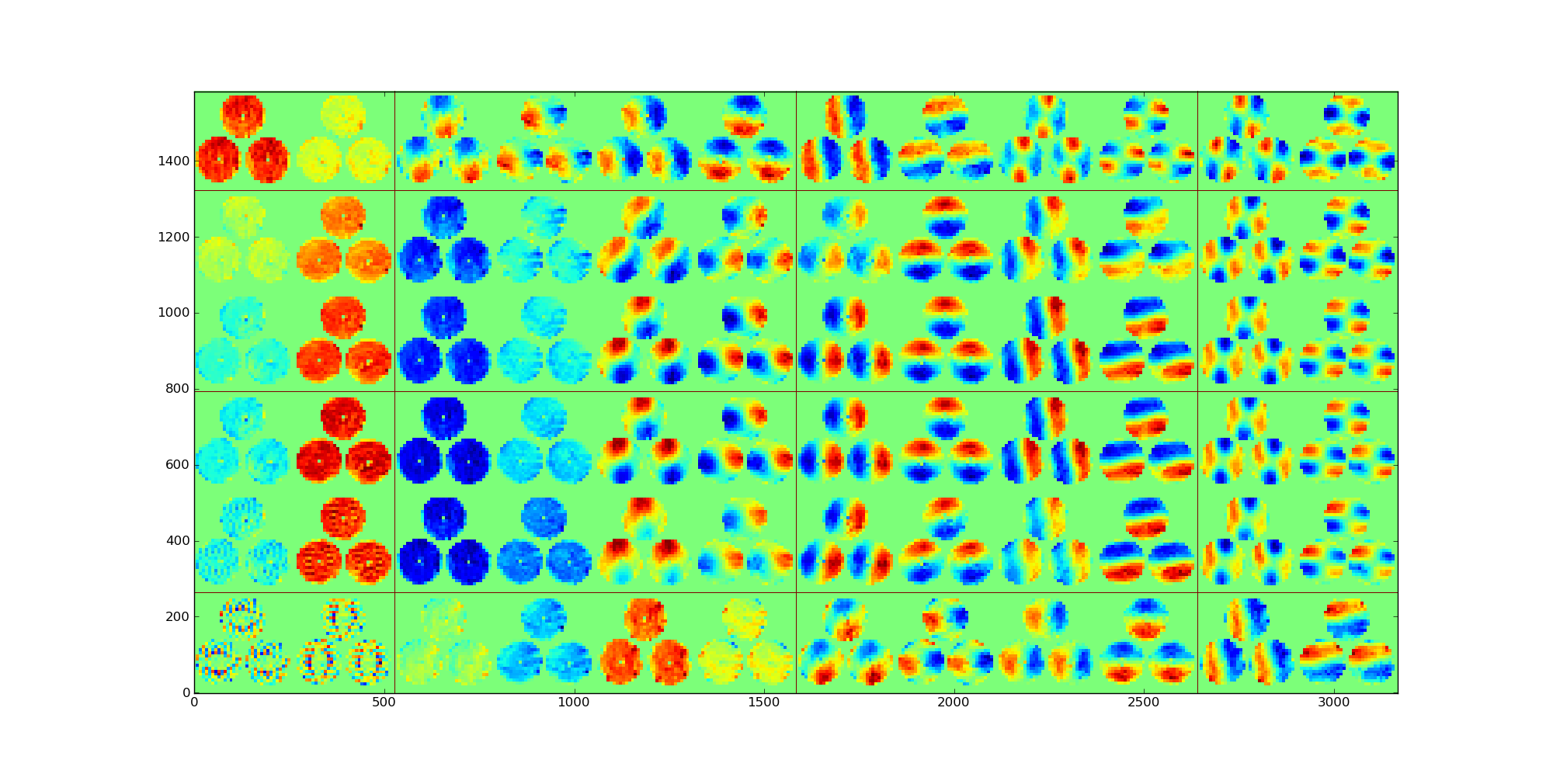
We build a
Combined REC LGSW only: 20161205_215600 and we test in in CL (we realize later we are running at 500 Hz):
| TN |
AO Gain |
AO CL |
TT Res. WF [nm rms] |
HO Res. WF [nm rms] |
AO rec |
DIMM ["] |
JCL |
PCL |
Notes |
| 20161205_215925 |
0.5,0.4,0.3 |
T |
171.547 |
29.0405 |
20161205_215600 |
-1 |
F |
F |
no dist |
| 20161205_220005 |
0.5,0.5,0.5 |
T |
169.706 |
31.4141 |
20161205_215600 |
-1 |
F |
F |
|
| 20161205_220028 |
0.5,0.5,0.5 |
T |
162.032 |
31.478 |
20161205_215600 |
-1 |
F |
F |
|
| 20161205_220146 |
0.5,0.5,0.5 |
T |
171.127 |
41.0832 |
20161205_215600 |
-1 |
F |
F |
dist= 0.8" |
| 20161205_220205 |
0.5,0.5,0.5 |
T |
170.464 |
40.8615 |
20161205_215600 |
-1 |
F |
F |
|
| 20161205_220224 |
0.5,0.5,0.5 |
T |
167.619 |
40.7466 |
20161205_215600 |
-1 |
F |
F |
|
| 20161205_220726 |
0.5,0.5,0.5 |
T |
168.944 |
53.3336 |
20161205_215600 |
-1 |
F |
F |
dist= 1.2" |
| 20161205_220752 |
0.5,0.5,0.5 |
T |
173.373 |
53.0889 |
20161205_215600 |
-1 |
F |
F |
|
| 20161205_220821 |
0.5,0.5,0.5 |
T |
167.337 |
53.3403 |
20161205_215600 |
-1 |
F |
F |
|
| 20161205_221056 |
0.5,0.5,0.5 |
T |
163.572 |
34.788 |
20161205_215600 |
-1 |
F |
F |
dist= 0.52" |
| 20161205_221129 |
0.5,0.5,0.5 |
T |
159.465 |
34.8484 |
20161205_215600 |
-1 |
F |
F |
|
| 20161205_221157 |
0.5,0.5,0.5 |
T |
163.247 |
34.5221 |
20161205_215600 |
-1 |
F |
F |
|

Back to 1 kHz operation:
| TN |
AO Gain |
AO CL |
TT Res. WF [nm rms] |
HO Res. WF [nm rms] |
AO rec |
DIMM ["] |
JCL |
PCL |
Notes |
| 20161205_221419 |
0.5,0.5,0.5 |
T |
117.739 |
53.9813 |
20161205_215600 |
-1 |
F |
F |
no dist |
| 20161205_221436 |
0.5,0.5,0.5 |
T |
123.496 |
53.0062 |
20161205_215600 |
-1 |
F |
F |
|
| 20161205_221509 |
0.5,0.5,0.5 |
T |
118.352 |
53.0865 |
20161205_215600 |
-1 |
F |
F |
|
| 20161205_221622 |
0.5,0.5,0.5 |
T |
114.115 |
57.952 |
20161205_215600 |
-1 |
F |
F |
dist= 0.52" |
| 20161205_221641 |
0.5,0.5,0.5 |
T |
109.071 |
56.5576 |
20161205_215600 |
-1 |
F |
F |
|
| 20161205_221708 |
0.5,0.5,0.5 |
T |
120.127 |
57.5131 |
20161205_215600 |
-1 |
F |
F |
|
| 20161205_221818 |
0.5,0.5,0.5 |
T |
117.323 |
62.9583 |
20161205_215600 |
-1 |
F |
F |
dist= 0.8" |
| 20161205_221837 |
0.5,0.5,0.5 |
T |
117.448 |
62.1882 |
20161205_215600 |
-1 |
F |
F |
|
| 20161205_221859 |
0.5,0.5,0.5 |
T |
120.782 |
62.514 |
20161205_215600 |
-1 |
F |
F |
|
| 20161205_222019 |
0.5,0.5,0.5 |
T |
127.931 |
72.5675 |
20161205_215600 |
-1 |
F |
F |
dist= 1.2" |
| 20161205_222041 |
0.5,0.5,0.5 |
T |
121.263 |
72.1913 |
20161205_215600 |
-1 |
F |
F |
|
| 20161205_222104 |
0.5,0.5,0.5 |
T |
117.689 |
72.064 |
20161205_215600 |
-1 |
F |
F |
|

Then we also build
Combo REC w/ FLAO BIN4: 20161205_222600 using FLAO REC 20150517_134926.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}