Test of pupil recentering w/ slope rms
We switch on the system and setup for Pyramid TT. We find again that pupils are not in the proper position (from illumination pattern).
We close the AO loop w/o disturb.
We start from yesterday's motor position (pos0) and we try to minimize the XY slope rms shown in Gilles' GUI.
- at the beginning we can set a max HO gain on 0.35 (motors in pos0)
- we see that Y slope rms is higher than X one, we try to move the 3 motors up by 10 steps (pos1)
- with motors in pos1 we can rise the HO gain up to 0.45, at 0.5 it oscillates again
- we move again the motors up (pos2) and we get the same HO wf rms of yesterday...

| TN |
AO Gain |
AO CL |
TT Res. WF [nm rms] |
HO Res. WF [nm rms] |
AO rec |
DIMM ["] |
JCL |
PCL |
Notes |
| 20161207_160536 |
0.5,0.5,0.5 |
T |
73.5226 |
43.4666 |
20161205_222600 |
-1 |
T |
F |
|
| 20161207_160722 |
0.5,0.5,0.5 |
F |
54.7256 |
672.56 |
20161205_222600 |
-1 |
T |
F |
|
| 20161207_160807 |
0.5,0.5,0.35 |
T |
61.2354 |
254.402 |
20161205_222600 |
-1 |
T |
F |
pos0 |
| 20161207_160858 |
0.5,0.5,0.35 |
T |
69.8744 |
43.0832 |
20161205_222600 |
-1 |
T |
F |
pos1 |
| 20161207_161004 |
0.5,0.5,0.5 |
T |
71.9478 |
185.058 |
20161205_222600 |
-1 |
T |
F |
pos1 |
| 20161207_161045 |
0.5,0.5,0.5 |
T |
58.3707 |
42.526 |
20161205_222600 |
-1 |
T |
F |
pos2 |
DX LGS jitter to NGS stage test
We acquire a new calibration:
20161207_163400 w/ LUCI rotator at 160 deg. Then we try to close the AO loop and to offset the NGS stages to see if they are shifted back.
DX NGS stage to PatCam calibration
We acquire it by hand:
- Pos 0: stages @ [-73.228; -51.521] mm
- Pos 1: stages @ [-69.243; -51.521] mm, TN: 20161207_170129
- Pos 2: stages @ [-77.239; -51.520] mm, TN: 20161207_170405
- Pos 3: stages @ [-73.244; -55.514] mm, TN: 20161207_171439
- Pos 4: stages @ [-73.243; -47.515] mm, TN: 20161207_172121
to assess the spot position on the
PatCams we use the same measurement procedure of the pupMirrorToPatCam IM.
IM and REC saved by hand into the file:
/home/argos/ngsStages2PatCam_20161207_180500.
From the measurement we assess the jitter scale to be ~3 mrad/" on sky on the
PatCams.
Then we produce the
Jitter to PatCam calibration (IM and REC) and we save them in this path:
/home/argos/jitterPosition2PatCam_20161207_183600
To get the final guiding algorithm we need to calibrate on-sky the
PatCam to LAS pupil mirror.
Then we will need to multiply the jitter position values by the
Jitter2PatCam IM and then by the
PupMirror2PatCam REC to get the proper pupil mirror values...
We first produce the
QC combined REC: 20161207_190200 using the LGSW REC: 20161205_215400
we close w/o disturb and the TS does not work...
The co-pointing REC is broken, we set the 2015/12 one as default and we retry w/ and w/o disturb:
| TN |
AO Gain |
AO CL |
TT Res. WF [nm rms] |
HO Res. WF [nm rms] |
AO rec |
DIMM ["] |
JCL |
PCL |
Notes |
| 20161207_212527 |
0.2,0.5,0.5 |
T |
277.546 |
39.6387 |
20161207_190200 |
-1 |
T |
F |
|
| 20161207_212628 |
0.2,0.5,0.5 |
T |
295.908 |
40.7762 |
20161207_190200 |
-1 |
T |
F |
|
| 20161207_213125 |
0.2,0.5,0.5 |
T |
288.101 |
41.3917 |
20161207_190200 |
-1 |
T |
F |
|
| 20161207_213510 |
0.2,0.5,0.5 |
T |
248.556 |
71.7305 |
20161207_190200 |
-1 |
T |
F |
|
| 20161207_213536 |
0.2,0.5,0.5 |
T |
244.233 |
75.4243 |
20161207_190200 |
-1 |
T |
F |
|
| 20161207_213551 |
0.2,0.5,0.5 |
F |
243.021 |
79.0452 |
20161207_190200 |
-1 |
T |
F |
|
| 20161207_213827 |
0.2,0.5,0.5 |
T |
270.873 |
53.7633 |
20161207_190200 |
-1 |
T |
F |
|
| 20161207_213855 |
0.2,0.5,0.5 |
T |
246.748 |
54.255 |
20161207_190200 |
-1 |
T |
F |
|
| 20161207_214001 |
0.2,0.5,0.5 |
T |
246.14 |
55.0594 |
20161207_190200 |
-1 |
T |
F |
|
| 20161207_214224 |
0.2,0.5,0.5 |
T |
255.778 |
50.2866 |
20161207_190200 |
-1 |
T |
F |
|
| 20161207_214243 |
0.2,0.5,0.5 |
T |
273.456 |
48.8919 |
20161207_190200 |
-1 |
T |
F |
|
| 20161207_214259 |
0.2,0.5,0.5 |
T |
251.616 |
48.6748 |
20161207_190200 |
-1 |
T |
F |
|

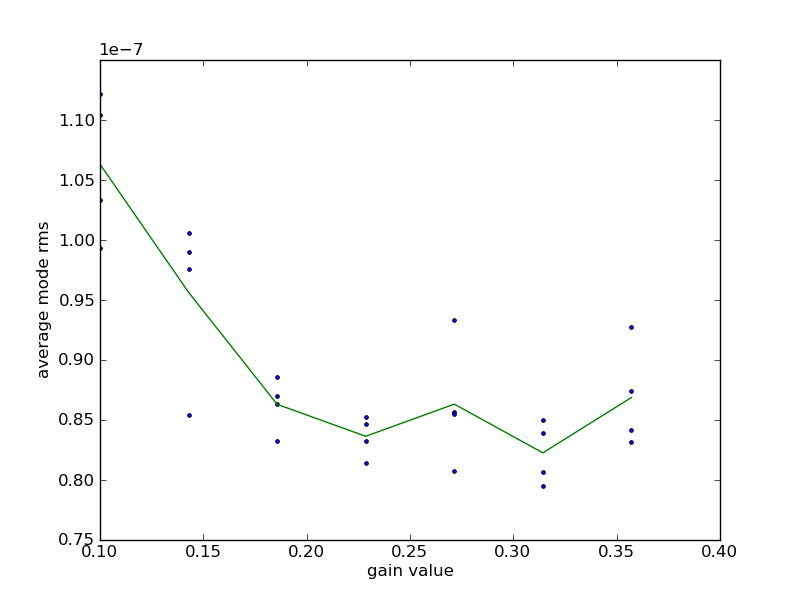
Then we also try the autogain procedure w/ 0.52" and 0.8" disturb:


{kind=link}
{kind=link}
{kind=link}
{kind=link}